WRO的機器人都相當「快、狠、準」,所以如何精準地控制機器人是重要的課題,明顯地,EV3-G內建的程序遠遠不夠我們使用。
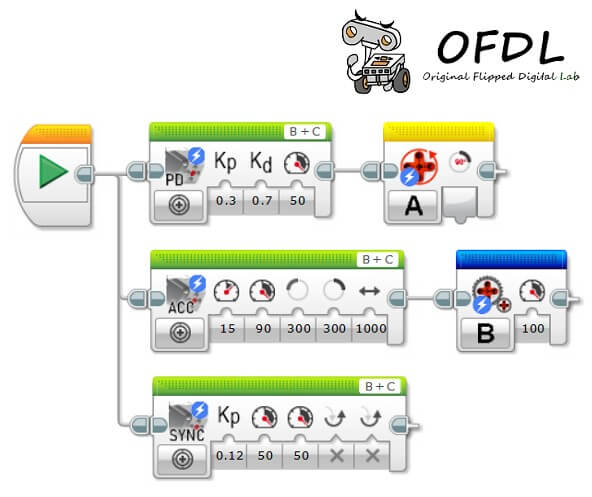
所以我們這是推出了五大模塊,專給WRO競賽組使用,分別是「PD控制器」、「同步移動控制器」、「非線性緩加減速控制器」😍
也因為製作成Block的原因,所以機器人的反應會比使用myBlock或是原生方塊來的更精確。
使用方法
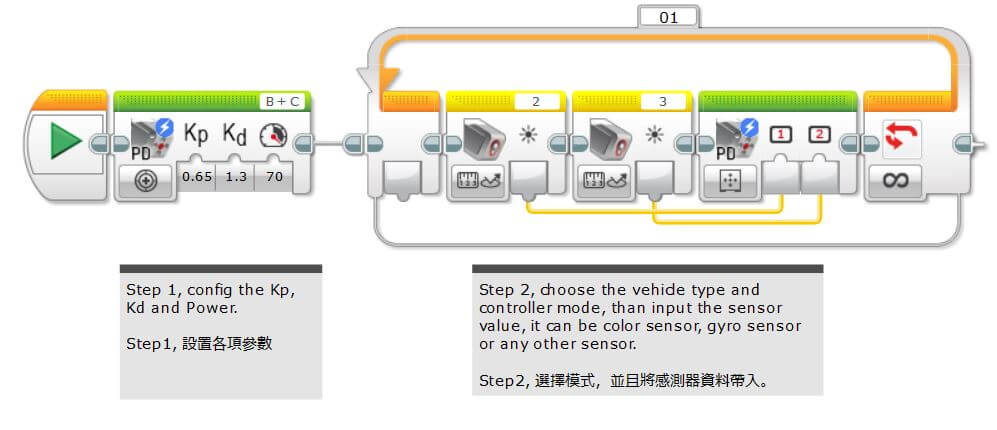
Example 1:單純PD控制器,將感測器值帶入就可以開始PD控制。
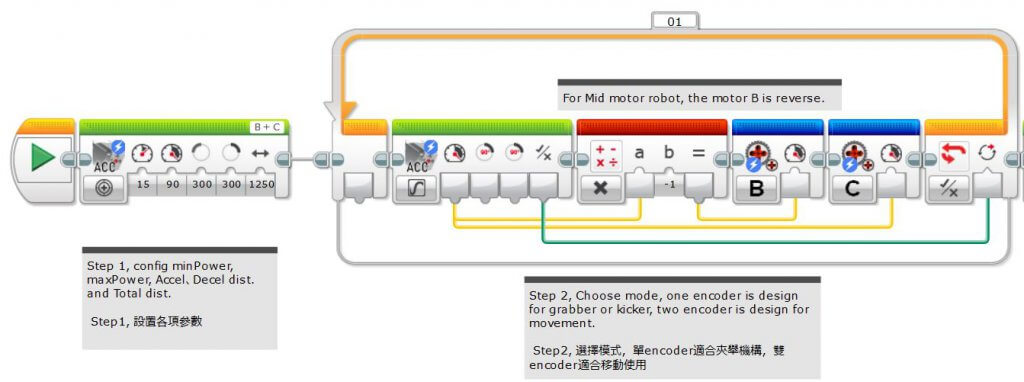
Example 2:單純緩加緩減速(ACC)控制器,在前方設置好參數與距離,即可自動化算出機器人的馬力,與停機條件。
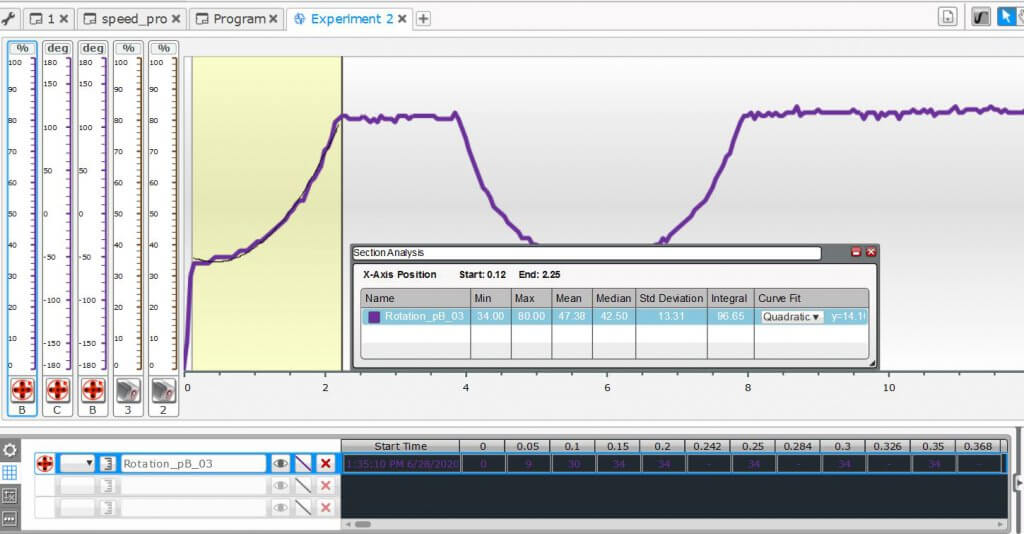
這裡順便說明一下,我們的緩加減速(ACC)控制器,所使用的是非線性(non-linear)算式,實務上比較貼合二次函數曲線(quadratic function),也就是加速會是讓機器人稍微助跑後,再更快的加速到目標速度。實現快進快停的競速型機器人操縱。
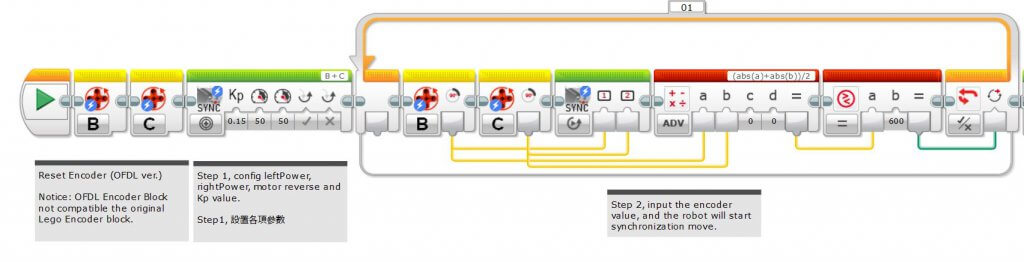
Example 3:單純同步控制(SYNC)控制器,在前方設置好馬力與反轉設置,後面將Encoder帶入,即可實現同步控制移動

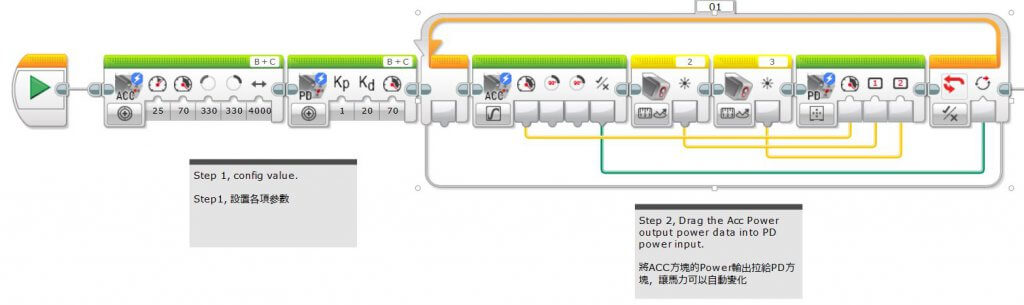
Example 4:緩加減速(ACC) + PD控制器,實現PD控制器運行時帶有緩加減速效果,讓機器人走的更穩定。
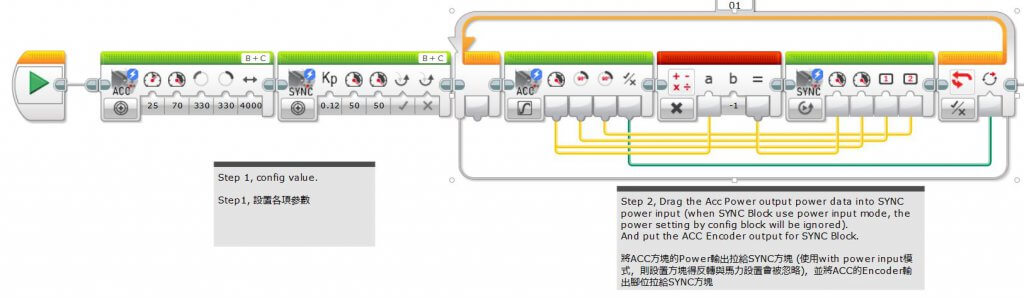
Example 5:緩加減速(ACC) + 同步控制(SYNC)控制器,實現機器人直走或轉彎時保證軌跡不變,且利用緩加減速來保證不翹頭、不急停。
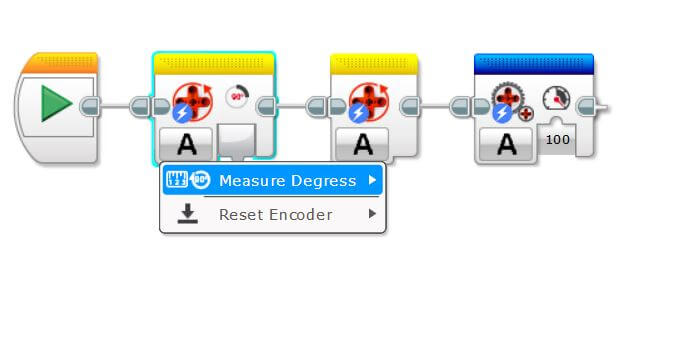
OFDL Encoder Block and Raw Motor Block,由於是從選單選擇Port,所以可以節省運算時間,讓馬達反應更快,另外由於使用了特殊Encoder手法(軟重置),所以重設非常快,在高速狀態下才不會有延遲現象發生。
其他部分就請看我們YouTube影片吧~~
Update:
Version 1.4:
.Add Optimized Green Motor block (opOutputSpeed)
Download:
Download Link(GitHub):https://github.com/a10036gt/EV3-AdvMotorControllers-Block
Author:OFDL HSU
Ver:1.4
貼心提醒,切勿將設置方塊放置於迴圈內,這將導致程序性能低落。