2019WRO剛過,在匈牙利拿下了世界第三,希望2020年能拚個世界第一,這裡 我們公開常年來所使用的特製版IR Block。
足球賽最常用的兩顆Sensor:IR Seeker V2 and Compass,Compass沒有什麼問題,IR倒是問題多多,因為比賽現場IR常因光線或是反射等問題而誤判,從而導致機器人動作不流暢。
最常見的莫過於”背後靈”,就是球在後面但跡器人往前衝,這就是典型的IR誤判例子,由於詳情介紹過多,稍後將以PDF的方式呈現。
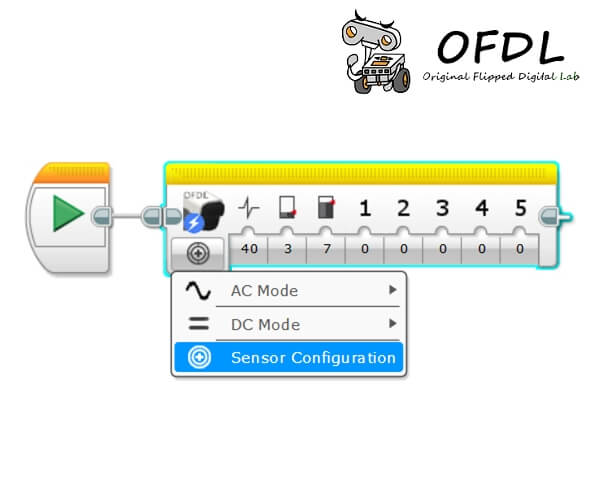
另外就是由於IR Seeker本身故建問題,所以容易導致特定小感測器(channel 1-5)數值不精確,故我們的Block在Sensor config模式中,有提供接腳可以微調各感測器的offset值。
使用方法
OFDL_AdvIRBlockV2_HelpUpdate:
Version 5.1:
.Fix the bug of HT IIC protocol, prevent some communication failed.
.Add Frequency Setting mode, can set to 600Hz or 1200Hz for different IR ball.
Download:
Download Link(GitHub):http://bit.ly/37aDvzD
Author:OFDL HYT 、 OFDL HSU
Ver:5.1
PDF Help Download:
Specialty Thanks to our Gold Partner:T2H Robotics, our IR Block optimize based on their block.