Most commonly used Sensor in WRO football:IR Seeker V2 and Compass
But the IR has a lot of problem, the IRSeeker often affected by sunlight or reflections…etc, Most commonly problem is ” Backseat Driver “, it means the ball behind the robot, but robot still go straight, it is classic misjudgment of IRSeeker.
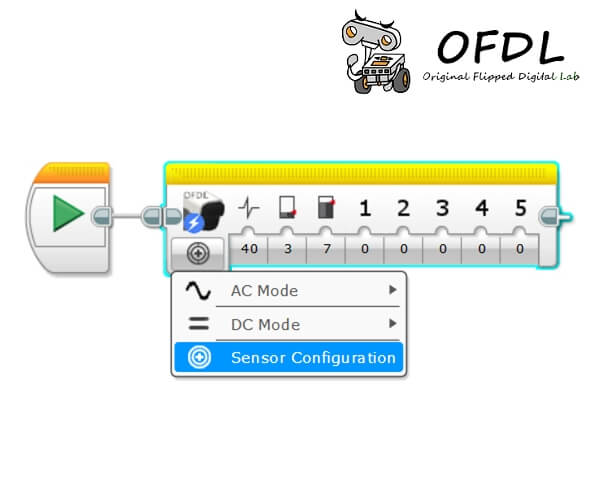
Another problem is the firmware in IRSeeker, will cause some “Small IR sensor”(channel 1-5) value inaccurate, so we add the “offset” options in “Sensor Config” mode, you can custom the offset value of each channel individually.
How to Use
OFDL_AdvIRBlockV2_EnHelpUpdate:
Version 5.1:
.Fix the bug of HT IIC protocol, prevent some communication failed.
.Add Frequency Setting mode, can set to 600Hz or 1200Hz for different IR ball.
Download:
Download Link(GitHub):http://bit.ly/37aDvzD
Author:OFDL HYT 、 OFDL HSU
Ver:5.1
PDF Help Download:
Specialty Thanks to our Gold Partner:T2H Robotics, our IR Block optimize based on their block.