雖然現在WRO足球組已經禁用了4輪萬向輪的足球機,但是4輪的全向移動在各方面都還是挺實用的,這裡我們把以前試驗過的4輪全向輪控制Block分享出來給各位看看啦~
使用說明
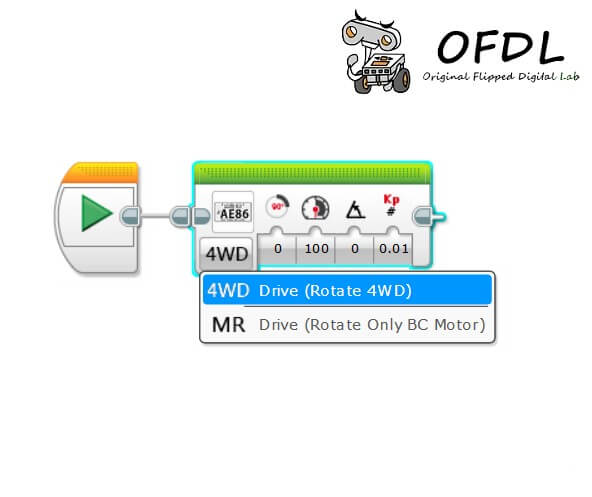
Angel:機器移動的目標角度,然後4顆馬達必須依照下圖擺放,方能正常運作:
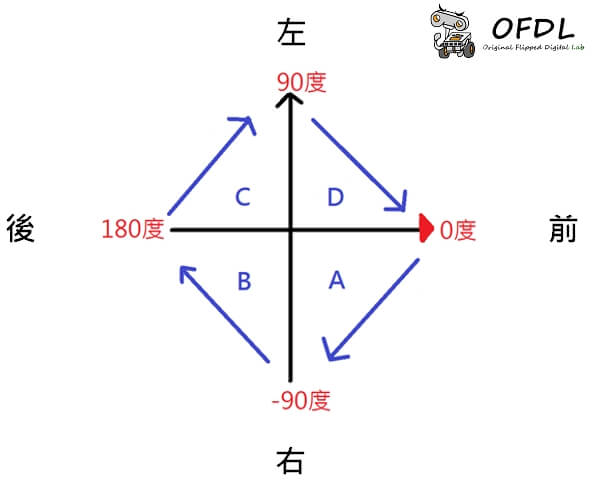
上圖中藍色箭頭為馬達預設正轉方向,如果要前進在Block Angel輸入0度就會往前,輸入90度往左…..這角度關係基本上與Compass的相對位置是相同的哦~
Power:機器人移動的基本馬力。
HT Compass RelHeading:把HT Compass的相對方位放進來就對了,沒有放等於沒校正。
Error Correction Kp:把HT Compass相對方位值當誤差(Error),由此Kp調整機器人校正量(自旋),偏離越大或Kp越大校正越快。
更新紀錄
- Ver 1.2 2019.06.05 update info:
- 加入HT Compass 相對方位輸入。
- 加入Kp輸入。
- 移除自旋量,被上面那兩個取代了。
- 代碼由 OFDL HYT 重新優化。
Download
Download Link(GitHub):http://bit.ly/2HLXmee
Author:OFDL HSU、OFDL Wun、OFDL HYT
Ver:1.2