Although the WRO football has now disabled the 4 wheel omni football robot, but the 4 wheel omni football robot are quite practical in other competition. Here we share the previously tested 4 wheel omni football robot control block. Take a look~
Instructions
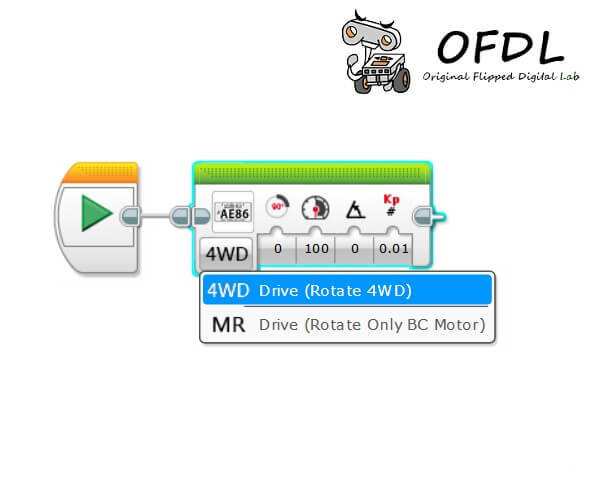
Angel: The target angle of the robot movement, then the four motor must be placed according to the following figure in order to function properly:
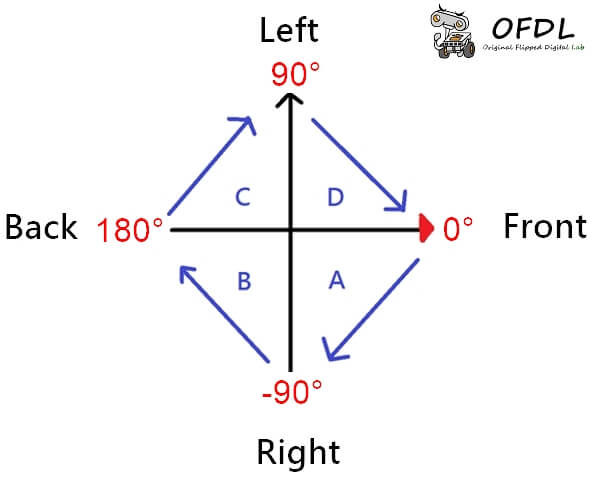
The blue arrow in the above picture is the motor’s preset forward direction. If you want to go forward, enter 0 degrees and robot will go forward, enter 90 degrees to the left…etc, The angle relationship is basically the same as the relative position of Compass.
Power: The basic power (standard power) of robot movement.
HT Compass RelHeading:Just input the HT Compass Relative Heading here, if input empty, the robot will not correct it heading self.
Error Correction Kp: HT Compass RelHeading * Kp = Error Out, it will put the error amount into 4 or 2 morots, to correct robot’s heading, if Kp too large, robot will not correct ordinary.
Update
- Ver 1.2 2019.06.05 update info:
- Add HT Compass Relative Heading Input.
- Add Kp Error Correction Input.
- Remove Rotate Input, replace by HT Compass and Kp Input.
- Code optimization by OFDL HYT
Download
Download Link(GitHub):http://bit.ly/2HLXmee
Author:OFDL HSU、OFDL Wun、OFDL HYT
Ver:1.2