原生的EV3顏色感應器支持反射光、環境光及顏色模式,但這終究不能滿足我們的需求,製作解魔術方塊機器人的DavidGilday在早期也就有推出EV3 Color RGB mode,大致上完備了EV3 Color Sensor所需的功能,不過Color Sensor RGB的文件不太完善,所以我們順手加入了其他功能進去,包括RGB比較模式與眾所需要的感測器原值模式。
使用方法
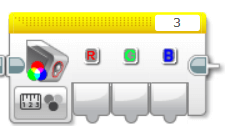
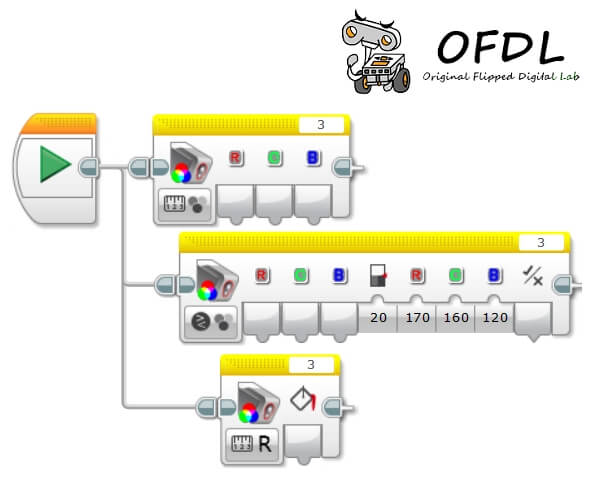
這個模式可以讓你讀取EV3顏感的R、G、B三種光的回傳值,此時顏感三顆燈都會亮,請注意,使用RGB模式時,顏感熄燈的機會會比一般模式高。
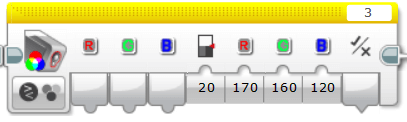
這個模式是RGB模式的一個變種,讓你可以通過修改輸入數值,來達到判斷效果,如上圖:20是Error Amount,R、G、B分別是190、160、120,那當我今天測到的物體其Red(紅光)讀取到150-190間、Green(綠光)在140-180間、Blue(藍光)在100-140間,三者成立則最後輸出邏輯值True,其中區間認定就是由Error Amount決定,也就是你輸入的RGB值+-Error,為判斷條件。
這部分可參考Builderdude35的影片 https://www.youtube.com/watch?v=L92DtL4S2bY

HSVL三維色域模式,可以讓你的感測器更精準的量測數值。
更新紀錄
Ver 1.6:
新增HSVL模式。
Download
Download Link(GitHub):http://bit.ly/30T2llb
Author:OFDL HSU、T2H Robotics
Ver:1.6